
1st Claw Design

2nd Claw Design
3rd Claw Design

4th Claw Design
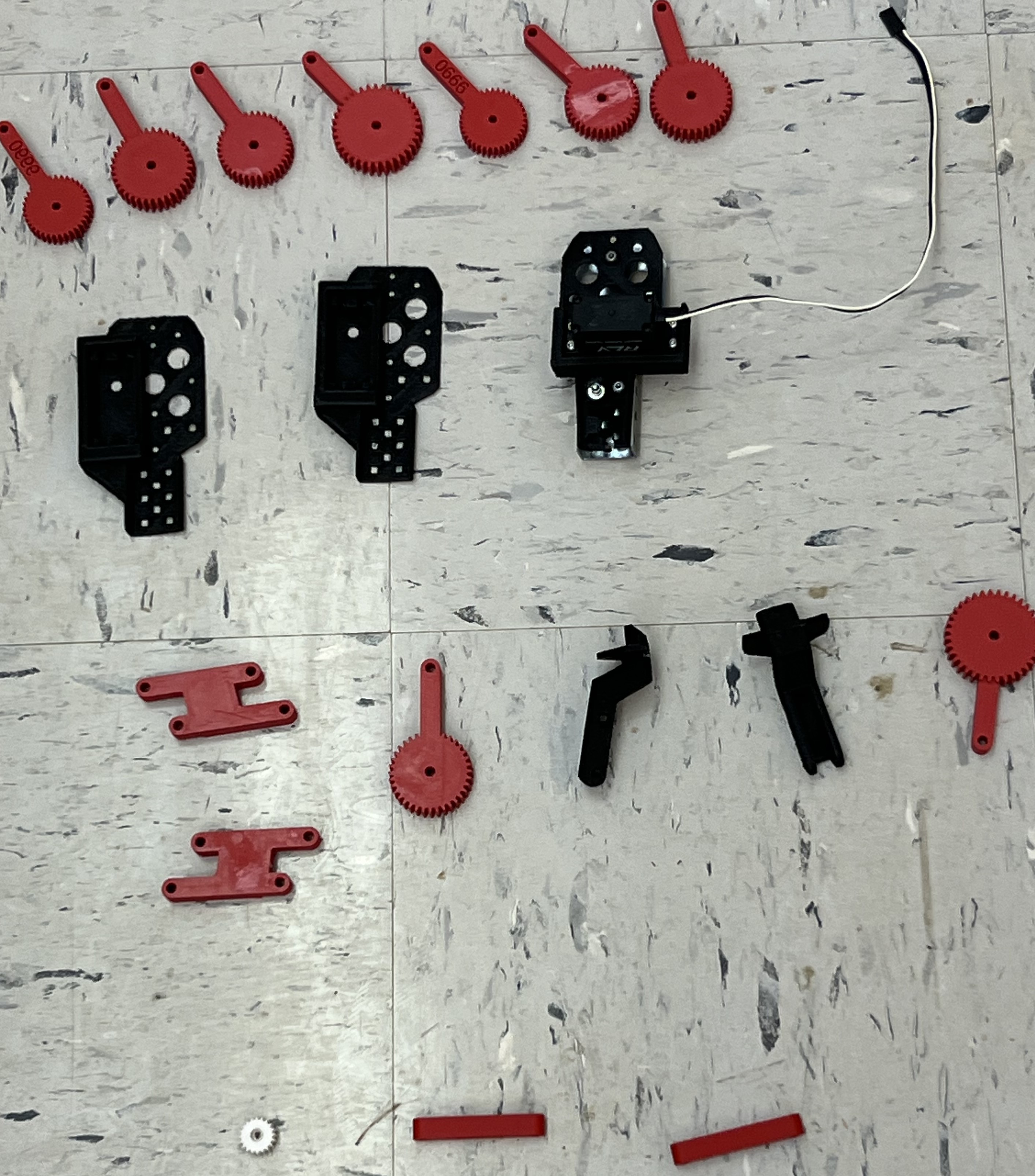
Claw Piece Collage
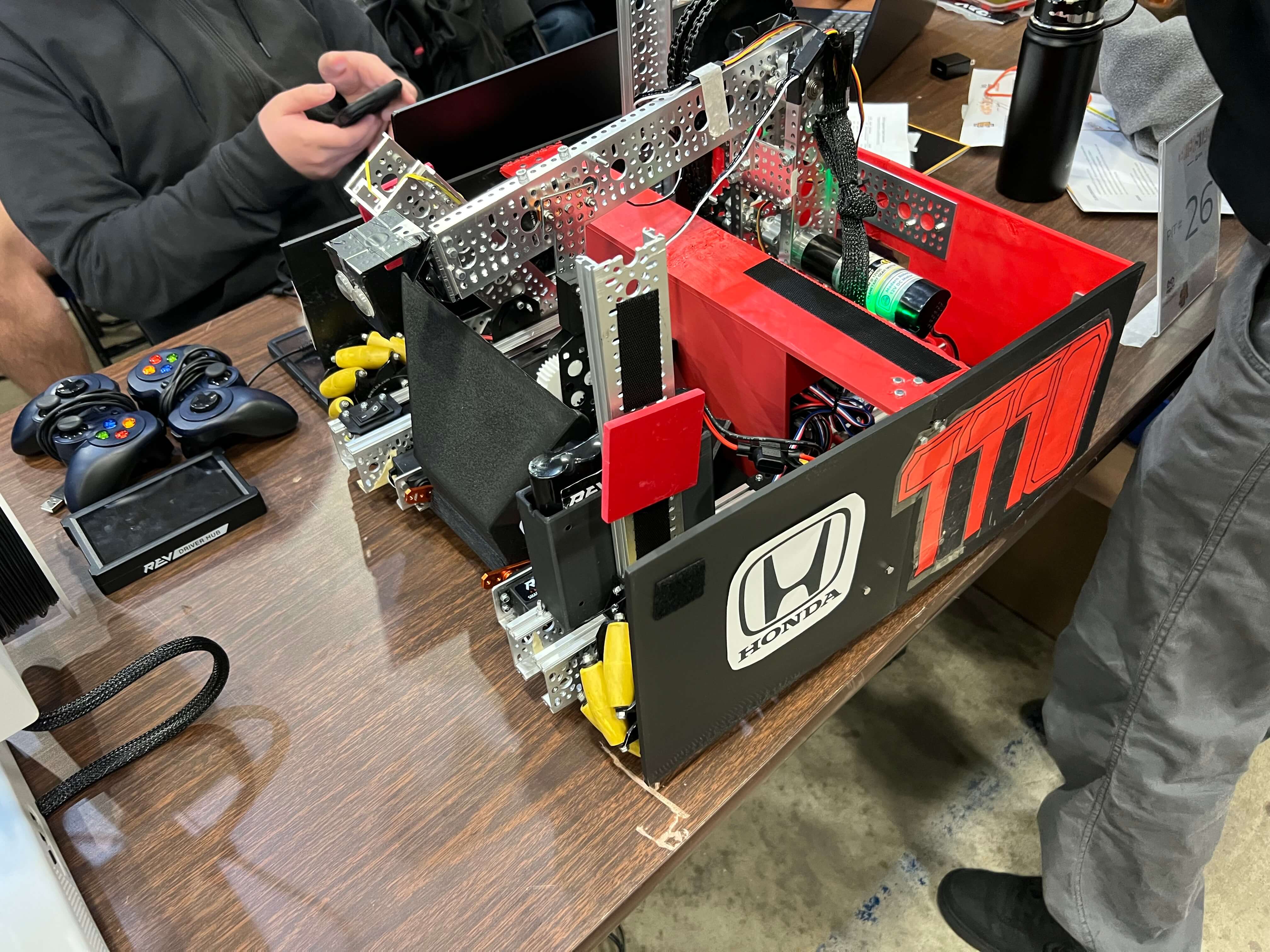
Finished Product
Fully assembled robot.
After deciding on an outtake design, our team figured out the gear ratios for the mechanism and the team's CAD designer went to work on a virtual prototype Once the prototype was set, we 3d printed the claw and tested it; the test went successful, so we attached it to our arm base with a servo.
Sadly, the claw was ineffective at holding the pixels so we had to make another design. On our second design, we used a 3d printed claw that had a flat grip than a curved grip like the other design. Although it could grip one pixel, it was ineffective at gripping two at a time, so we set out to make another design to hold two pixels at a time.
Fully assembled robot.
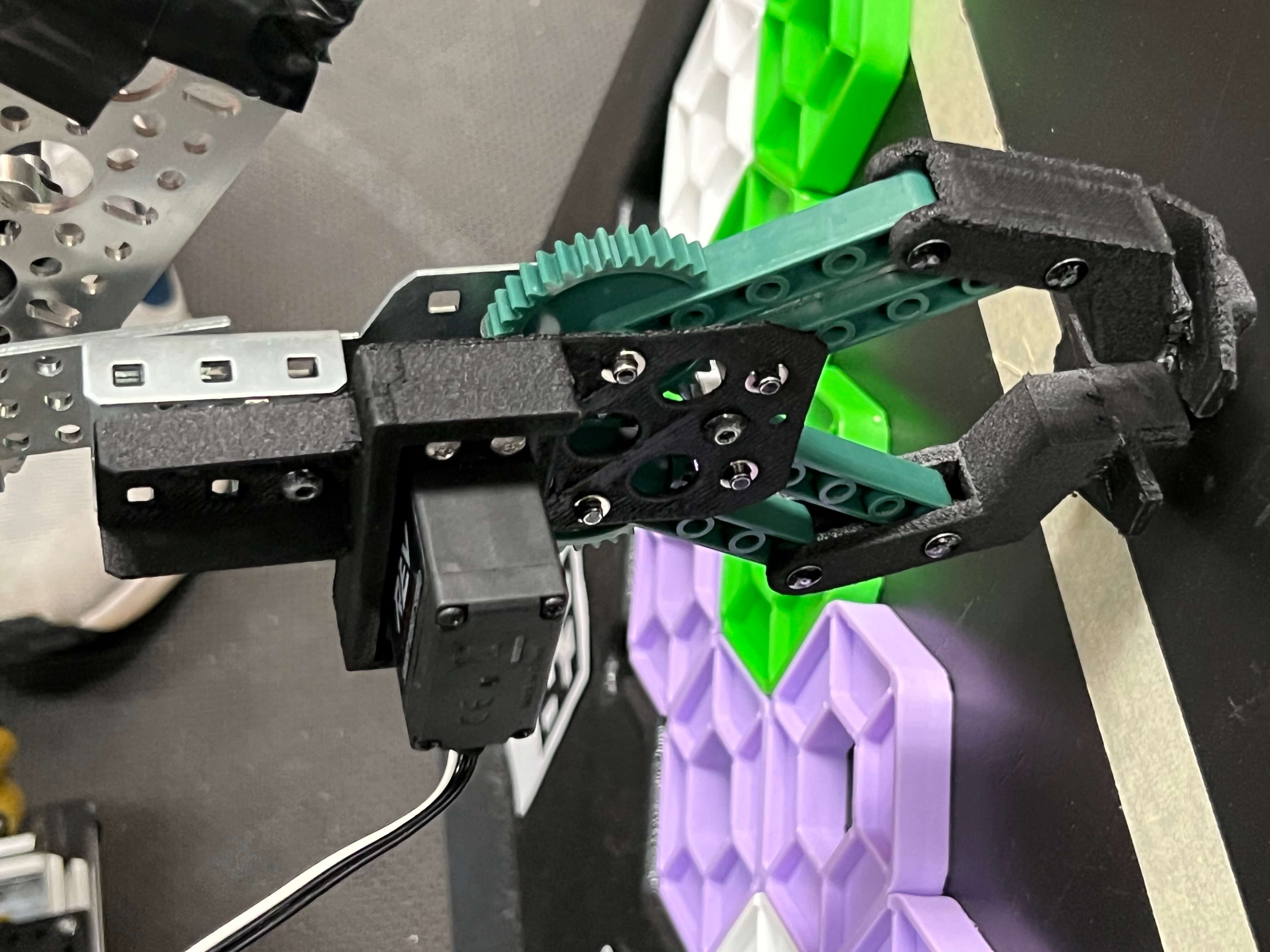
In our third design, we strengthened the grip by adding supports on the side of the "robo-fingers." This proved to work well because we were able to grip the two pixels without risking them falling apart. We were satisfied with our new design and added it onto our robot.
However, during our qualifier competition, our arm was turned down because we used a part that wasn't created by us. So to combat this, we measured and 3D printed all of our parts and assembled a final design for our claw. This claw passed the inspection, and so we used it instead.